Project Name : Inverted QUADROTOR and its MAVs
Theme Name : Transport & Communication
Disaster Management:
A Quadrotor is a new type of Rotorcraft concept for Unmanned Aerial Vehicles (UAVs). Inverted Quadrotor is a very special of its kind. It is an emerging and innovative concept in this field. It saves energy and has more endurance than the usual Quadrotor. Quadrotors are now

used by:
Disaster Management
Military transportations
Search and rescue missions, meteorology, penetration of hazardous environments
Air Surveillance
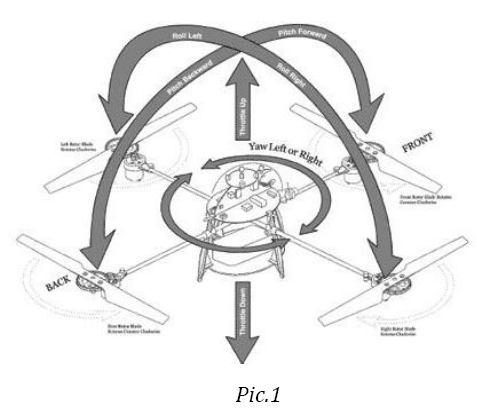
Quadrotors work using a symmetrical design with the motors located in each of the four corners. The rotors are fixed in their pitch with two of the rotors move clockwise and two of them move anti-clockwise. This design naturally cancels out torque and prevents quadrotor from rotating in the air. Control of the quadrotor is achieved by differential thrust generated by four motors attached to the rigid frame.
In future, Nano Inverted Quadrotor with Auto pilot will have increased flight time, indoor and outdoor flights without damaging the aircraft, higher payloads, more endurance and stability of the flight.



Name of the School: Kendriya Vidyalaya, ISRO, Vimanpur, Bangalore.
{kind=link}